 CLOSE SIDEBAR
CLOSE SIDEBAR
MEC 05 - Self-Adjusting Retractable Drone Landing Gear
Mechanical Projects
What is it?
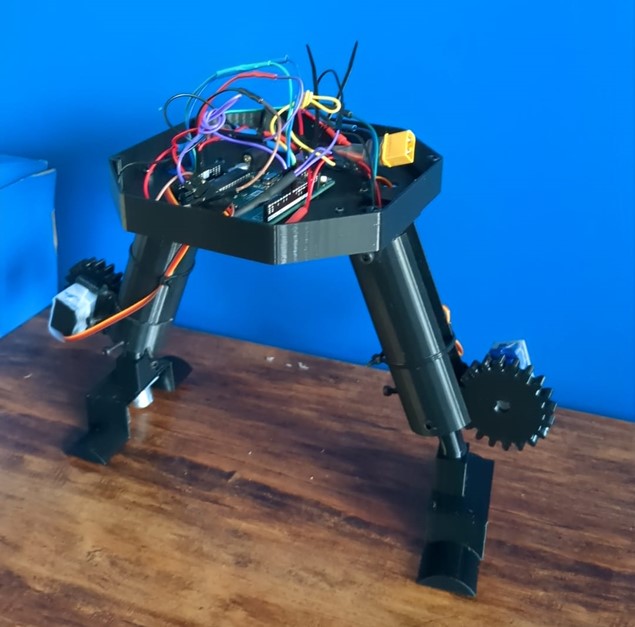
The project revolves around the creation of a unique landing gear system for drones. This system is designed to be self-adjusting and retractable, enhancing the drone’s operational flexibility and safety. The landing gear comprises two legs, each equipped with a rack and pinion mechanism that allows them to slide telescopically. The assembly includes a mounting bracket, leg sleeve, motor mount, gear, leg, and foot. All components are 3D printed using ABS plastic, contributing to cost-effectiveness and weight reduction.
What does it do?
The landing gear system is designed to autonomously adjust its leg length during the landing phase, allowing the drone to land safely on uneven surfaces without relying on visual guidance. The system uses an ultrasonic sensor (HC-SR04) in the drone leg’s feet to measure the distance to the landing surface. This data is sent to a microcontroller (Arduino Uno R3), which then sends PWM digital signals to a servo motor. These signals calculate the necessary extension or retraction to accommodate an uneven surface. The extension and retraction are facilitated by a 3D printed shaft and gear fixed to the drone leg mounts. The servo’s output shaft rotates the 3D printed shaft and gear subassembly, which uses a rack and pinion arrangement with equidistant holes in the extension leg to convert the gear’s rotational energy into linear motion.
Key Objectives
- Detailed design documentation (milestones), including 3D models and engineering drawings.
- Prototype of the retractable VTOL landing gear system.
- Testing documentation, including performance metrics and any necessary adjustments.
- Finalized production-ready landing gear system.
- Integration of the landing gear system with the designated UAV.
Why did you create this project?
The project was initiated to address a significant limitation in the current drone technology - the lack of autonomous landing capabilities and the use of fixed landing gear. Fixed landing gear impacts a drone’s aerodynamics, payload capacity, and ability to land on varied surfaces, thus limiting their operational flexibility. The self-adjusting and retractable landing gear system proposed in this project aims to overcome these challenges, thereby contributing to the industry’s growth. The project also serves as a practical application of the concepts learned from separate courses in the Aerospace Manufacturing Engineering program, such as design, 3D printing, electronics, and programming.
In conclusion, the project presents a novel approach to enhancing drone technology by introducing a self-adjusting and retractable landing gear system. It demonstrates a successful integration of mechanical and electronic principles, paving the way for future innovations in the field. The project not only addresses a significant limitation in current drone technology but also provides a practical application of theoretical concepts, making it a valuable contribution to the field of Aerospace Manufacturing Engineering.
Updated
2 years ago
Powered by Acadiate
© 2011-2026, Acadiate Inc. or its affiliates · Privacy