 CLOSE SIDEBAR
CLOSE SIDEBAR
MEC 02 - Prosthetic Device for Missing Fingers
Mechanical Projects
The objective of this project is to create an innovative and cost-effective solution to help people facing finger or hand loss. The prosthetic device we designed can grasp small and irregular shaped objects like coins, credit cards, pencils, and even small tools, making it more versatile than other prosthetics, such as hooks, that provide a very limited range of object manipulation.
There are three main steps to understand the working principle of the device:
• Vacuum is being generated with a piston cylinder device, similar to a syringe when one end is plugged and the plunger pulled out, it creates vacuum.
• A rubber balloon filled with granulated media (like sand) when pressed against an object, the shape of the object gets moulded into the balloon and sand.
• The vacuum travels through flexible tubing and evacuates the air inside the ballon causing it to shrink, at the same time the filling media gets compacted, while still maintaining the previously moulded shape of the object, effectively grabbing the object.
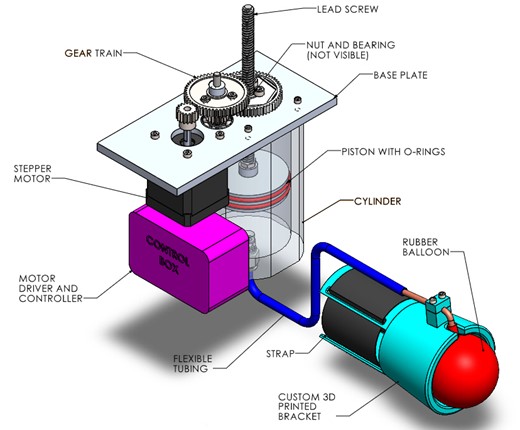
Our approach to solve this problem involves an electric motor along with a controller, a gear train, a lead screw and a piston cylinder. The functionality break down as below:
• The motor spins at 300 RPM thanks to the controller, which is programmed to run the motor with the press of a button, hold the vacuum for a determined amount of time and then drive back to release the object.
• The gear train consisting in 4 gears (17, 54, 19 and 56 teeth) reduces the speed and increases the torque at a ratio of 1008:95 which is roughly a 10.5 reduction ratio.
• The final gear is fixed to a trapezoidal nut. The nut is fixed to the base plate via a ball bearing, so when it rotates due to the gear train, it drives the lead screw linearly up and down.
• When the motor rotates clockwise, the piston drives out creating a vacuum, when it rotates counterclockwise the piston returns to the capped end returning the air pressure to the original pressure (atmospheric).
• Finally, after driving the piston out and creating the vacuum the balloon shrinks and grasps the objects.
Since one of the objectives of the project is to create a cost-effective solution, we 3D printed the arm brace, which can be easily adjusted to the specific size and needs of the end user. We used an elastic strap with Velcro so the user can secure the brace to the arm. The design of the brace also features a funnel like shape to hold and provide backing to the balloon so that it can be pressed against the objects to be picked up. To keep the balloon in place we are using three neodymium magnets inserted inside the brace bracket as well as the inner wall of the balloon, this way it can be snaped in place by the magnetic attraction and is a feature thought so that the balloon can be easily replaced in case it punctures.
One key parameter of our design was to be able to operate the device within 3 seconds, any time greater that that would render the device impractical for the person to use in realistic situations. The prototype was successfully tuned and tested, by adjusting the motor speed and finding the best possible RPM of the motor and measuring the time it took for the mechanism to operate the piston to generate vacuum as well as the return stroke. We managed to run the vacuum stroke in 2.5 seconds and the return stroke in 2.3 seconds, which exceeded our expectations.
There are a few recommendations for future improvements:
• Optimizing the weight of the device (it currently weights 3 pounds) and integrating it with a battery pack into a harness or backpack to be carried by the user. The flexible tubing can be run through the arm of the user to the end of the brace.
• Work alongside healthcare professionals to create an orthopedic functional model of the brace.
• Work with electronic engineering professionals to develop hands free control of the device.
Updated
2 years ago
Powered by Acadiate
© 2011-2026, Acadiate Inc. or its affiliates · Privacy