 CLOSE SIDEBAR
CLOSE SIDEBAR
EL 14 - Fully Self-Engineered Mini Quadcopter
Electronics Project
The self-engineered mini quadcopter project goal was to going through the whole design process (without utilizing off the shelf products) and perceive a comprehensive understanding of how to design, implement, and improve a quadcopter. Although, the goal was understanding the concept of the quadcopter, but we put one step further and tried to add some more features which can’t be found as a common feature in the marketplace products. Noteworthy to mention, these features will enhance the functionality, power consumption, and working range of this product. As you can see we started this design with a mini-quadcopter to be cost efficient in terms of R&D, which should not be misinterpreted that this product can’t compete with high-tech products. A quick review of the functionality of this project is reading sensors (3-axis gyroscope, 3-axis accelerometer, 3-axis compass, temperature, humidity, pressure, camera), communicating with a server (receiving commands and sending back status), and processing the collected data.
Speaking of what is this capstone project about, this project is about the principles, about implementation and understanding different aspects of a project and self-awareness of how to plan and doing project management along with facing different challenges of each steps in design and manufacturing a product from scratch. Learning risk management, when, and where to look for different sources and third parties were also part of “what this capstone project is about”. This was not supposed to be a new innovative project, although we have considered to utilize high-tech components in terms of safety, technology and so on… .
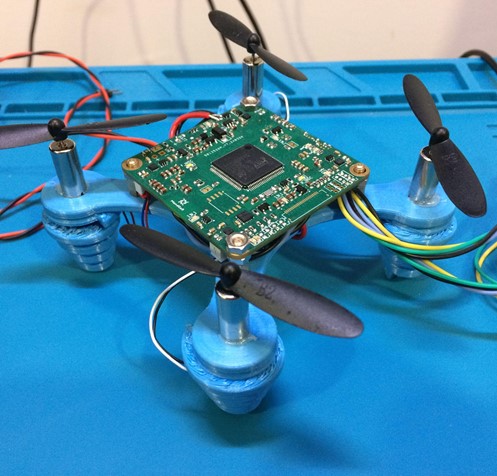
To enumerate what this project does, this quadcopter is equipped with 2 environmental sensors (To read 3-axis gyroscope, 3-axis accelerometer, 3-axis compass, temperature, humidity, pressure), a camera, two different wireless communication standards and frequencies (2.4GHz, 915MHz), and two individual MCUs; one Cortex M33 and a Cortex M4 to act as a flight controller and a radio controller respectively. On the operator side, there is an application which will be installed on a PC/Cell phone and is connected to a server to collect the data along with displaying the camera output on the monitor for the operator.
I engaged in this project to challenge myself by implementing all of the various parts of this project to gain expertise as a drone entrepreneur.
Group 4 consists of only 1 member and that is myself. I’ve accomplished the following:
- Conceptual design
- system design,
- GUI application programming
- 3D model mechanical design of the quadcopter frame
- component selection
- designing a suitable PCB (6 Layers PCB that includes 300 components in a very small size 50*50 mm2)
- Assembly of the PCB
- dealing with suppliers
- Financial accounting techniques to minimize project cost
- Complete documentation and presentation for this project.
In conclusion, quadcopter project is designed to be scaled and improved in the future and have the ability to transform to a complete new different drone in terms of functionality. Since the concept of designing is perceived, therefore, we can cover a various types of similar products just by a small change in the design.
Updated
2 years ago
Powered by Acadiate
© 2011-2026, Acadiate Inc. or its affiliates · Privacy