 CLOSE SIDEBAR
CLOSE SIDEBAR
EL 11 - Development of a Haptic Navigation Mobility Aid for Blind and Visually Impaired
The Mobility Aid project was developed by our team to solve a major and frequently disregarded issue that visually impaired people encounter: securely and independently traveling in environments where audio-based guidance is no longer effective. We came up with the concept because we were interested in assistive technology and wanted to use our expertise to help a community that was in need. We realized that although white canes, audio cues, and GPS applications are frequently utilized, they are ineffective in noisy settings like crowded places, train stations, and bustling streets. Verbal instructions may become unclear or hard to hear in certain circumstances, posing needless risk. By using user-centered design thinking and market research, we were able to pinpoint a problem with the current solutions: the absence of small, wearable gadgets that offer instantaneous, nonverbal input for safe navigation. Our initiative aims to close that gap by providing a haptic, quiet navigation aid that enhances rather than replaces current ones.
Using haptic feedback and obstacle detection, the wristband-style mobility aid helps users comprehend their immediate surroundings without the need for visual or auditory cues. We developed a wearable solution that is practical, discrete, and comfortable in everyday situations by combining a small, embedded hardware with a camera and computer vision software. Crosswalk recognition, obstacle avoidance, and complete GPS routing were all part of our original product concept. But after more research and viability tests, we narrowed our emphasis to highlight the unique features of our solution—real-time obstacle recognition and directional haptic feedback. We were able to shorten the development time, simplify the system, and produce a more targeted and practical solution for those with visual impairments. We made sure our solution still provided significant value by reducing the scope, particularly in circumstances where other devices failed.
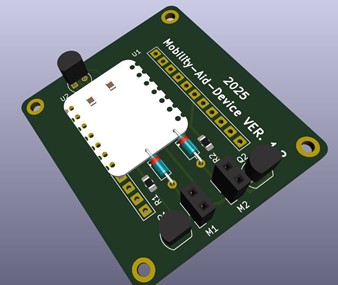
We decided to use the LuckFox PICO Mini A development board since it is reasonably priced and able to handle the processing load needed for real-time object identification. To help the YOLOv5 object identification model, which has been trained to recognize typical obstacles, we included a camera module that provides a live video stream. Because YOLOv5 strikes a balance between speed and precision, it may be used in real-time on embedded platforms. Two vibration motors on the left and right sides of the wristband receive signals from the software, which decodes the position and vicinity of things it has identified. Users may "feel" where possible dangers are in their path since the vibration strength will increase with the item's approach and the left or right motor will turn on depending on where the object is in the camera frame.
We investigated current products and assistive technologies during development to make sure we weren't replicating already-existing solutions. We looked at products that are often used by the visually challenged population, such Seeing AI, Be My Eyes, and audio-based GPS navigation devices. Despite providing a great deal of assistance, these technologies are mostly smartphone- based, rely on spoken cues, and frequently demand for active user participation. Our approach, on the other hand, is made to operate quietly in the background, offering clear instructions without bothering the user or requiring their continuous attention. We had to optimize the object detection program to function well on low-power devices, which was one of the main development hurdles. In order to overcome this, we trained the model on a carefully selected dataset of obstacle photos, reduced unnecessary classes, and enhanced inference speed for real-time video streams.
Three main demands were identified in the system requirements we generated from a design perspective: non-verbal directional input, real-time obstacle detection, and a small, wearable form factor. Our specific goals were haptic feedback reaction times under one second, ergonomic comfort appropriate for everyday usage, and a minimum of 98% detection accuracy for obstacles within 10 meters. The fundamental issue of hazardous or ambiguous navigation in loud situations is immediately addressed by these standards. In order to do this, the final system uses a smooth loop in which the camera continually records video, YOLOv5 processes the feed, the system locates and detects impediments, and pulse-width modulation (PWM) signals are transmitted to the appropriate motor for feedback, which securely guides the user.
The sensor unit (camera and processor), the processing software (YOLOv5 and custom feedback code), and the output system (left and right vibration motors) make-up the device's three primary system components. All parts are USB-C powered by an external battery bank, making them portable and simple to recharge. The gadget is feasible for future widespread acceptance due to its superior design, which guarantees simplicity, efficiency, and dependability while preserving low production costs.
In conclusion, our Mobility Aid project offers a novel and useful way to help people with vision impairments who require quiet, safe help in challenging circumstances. This technology can greatly improve user confidence, independence, and safety by concentrating on the primary requirement, which is real-time, non-verbal obstacle awareness. Even though our initial vision was more expansive, we were able to focus on the most significant element of our vision by honing our objectives. Consequently, we have created a significant addition to the field of assistive technology that uses cutting-edge machine learning methods and careful design to meet a pressing need.
Updated
1 year ago
Powered by Acadiate
© 2011-2026, Acadiate Inc. or its affiliates · Privacy