 CLOSE SIDEBAR
CLOSE SIDEBAR
EL 15 - Bionic Prosthesis Hand
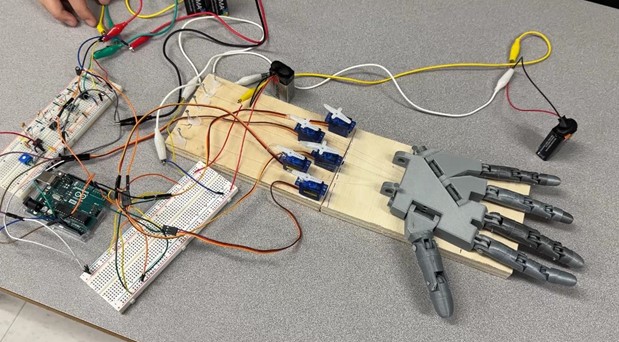
Our project is a bionic hand prosthesis designed as an affordable and functional solution for people with amputation or loss of hand mobility. The goal is to provide an alternative to expensive commercial prostheses and help users perform basic actions: grasping light objects, using the hand in daily activities, and partially restoring natural functionality. Such a prosthesis can be especially useful when the user’s other hand is occupied or has limited movement.
The system is based on an Arduino Uno microcontroller, five servo motors, and an electromyographic (EMG) sensor that detects muscle activity. When a muscle contracts, electrodes attached to the skin pick up a biosignal. Our custom-built EMG sensor, based on the design from Instructables, processes this signal by filtering out high-frequency noise, converting the signal from AC to DC, and then eliminating low-frequency environmental interference. The cleaned analog signal is then sent to the Arduino for further processing.
The Arduino analyzes the signal level, and when it exceeds a predefined threshold (e.g., 600), it triggers the servo motors to activate. Each motor controls a single finger. The fingers are connected to the motors with fishing line routed through channels inside the 3D-printed phalanges. As the servo rotates, the line pulls the finger closed. When the muscle relaxes and the signal drops below the threshold, the motors release tension and the fingers return to the open position.
The mechanical design is based on a 3D-printed hand from the open-source Inmoov project, which we modified to improve mobility. Fingers consist of joints, which allow for a more natural gripping motion. The hand is assembled using nails, glue, and fishing line, making it durable, easy to repair, and straightforward to build.
The power supply is organized externally: two 9V batteries are used to power the servos — two motors are connected to one battery, and the other three to the second battery — ensuring stable operation across all five fingers. The EMG sensor is powered by a ±9V configuration using the same two batteries in series, providing a total of 18V split into +9V and -9V, which is required for accurate signal amplification.
This project demonstrates how low-cost components and accessible tools can be combined to create a functional biomedical device that brings meaningful benefits to users, especially those who may not have access to traditional prosthetic solutions.
Updated
1 year ago
Powered by Acadiate
© 2011-2026, Acadiate Inc. or its affiliates · Privacy