 CLOSE SIDEBAR
CLOSE SIDEBAR
MEC 01 - Robotized Mechanical Iris
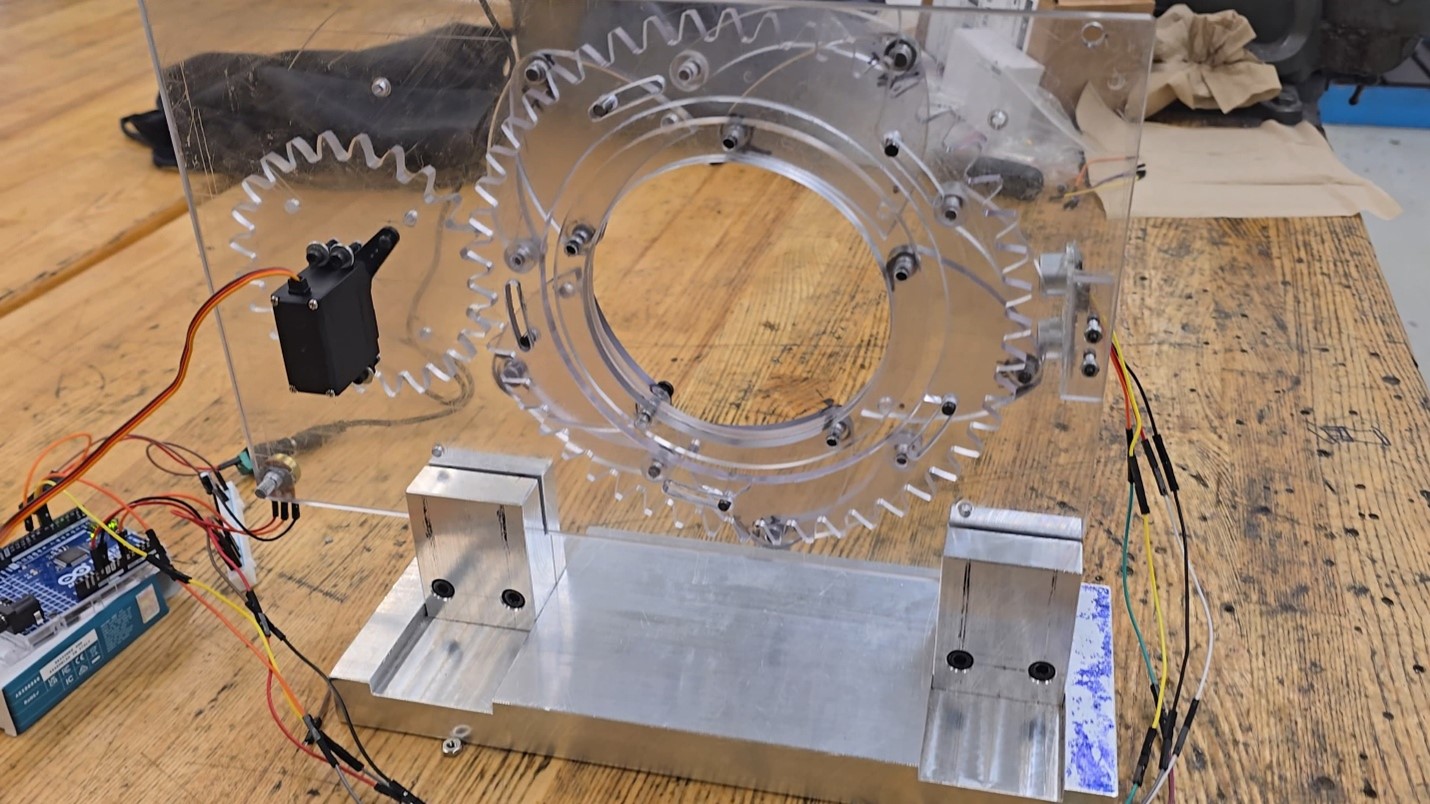
This project presents a fully motorized and sensor-driven mechanical iris, designed and built by students from the SETAS department of Centennial College studying Mechanical Engineering. The mechanism combines classic mechanical linkage design with modern automation and control systems to deliver a dynamic, functional, and aesthetically compelling prototype.
The iris works on the principle of radial linkages connected to a central spur gear. Each leaf of the iris is attached to a set of machined Lexan links, which move in perfect coordination when the gear rotates. This rotation is not manually operated; instead, it is powered by a smaller pinion gear attached directly to a servo motor, allowing for smooth, precise control over the aperture's size. The entire mechanism is mounted on a sturdy aluminum base, and the Lexan components were fabricated using both manual milling machines and a Hass VF3, reflecting a blend of traditional and modern manufacturing techniques.
The electrical system is driven by an Arduino Uno R4, which processes both manual and automated commands. In manual mode, a potentiometer allows the user to adjust the degree of opening by rotating a dial. Unlike standard servo systems that span 0 to 180 degrees, the iris only requires about 33 degrees of motion to open or close fully. This optimized range offers both control and efficiency, enabling the user to set the aperture precisely where needed, whether fully open, fully closed, or somewhere in between.
Automation is handled by an integrated ultrasonic sensor, which enhances the system’s intelligence and safety. The sensor emits ultrasonic waves and measures the time it takes for them to return after bouncing off an object. If something enters the detection range, set to cover the diameter of the iris, the sensor immediately signals the system to override manual control and close the iris. This safety feature simulates a practical response for real-world scenarios where interaction or intrusion must be regulated or blocked in real time.
The inspiration behind this project lies in the elegant mechanical motion of iris mechanisms used in architecture, optics, and artistic design. We wanted to take this concept a step further by adding robotic control, automation, and customizability, turning a simple motion system into a responsive, intelligent device. Applications for this design range from automated hatches, adjustable vents, and kinetic architectural elements to conceptual displays in interactive exhibits.
Through this project, we were able to merge creativity with engineering fundamentals, programming, and machining, all within a student-driven learning environment. The result is a functioning, visually engaging mechanical system that demonstrates how robotics can enhance traditional mechanical designs with smart functionality.
Updated
1 year ago
Powered by Acadiate
© 2011-2026, Acadiate Inc. or its affiliates · Privacy